登录
登录


 搜索
搜索 联系我们
联系我们

可选择实现单轴防摇、双轴防摇、三轴联动防摇功能

SKA2000 防摇控制器
SKA2000 防摇控制器是无人行车的核心关键部件,实现行车吊运过程中XYZ三轴位置与摇摆角度的双闭环控制功能,确保行车自动运行过程定位精准且吊物的摇摆最小。
SKA2000防摇控制器与行车PLC、变频器、摇摆倾角测量系统一同协同工作,实现整台行车的电子防摇功能,具有丰富的功能。
产品特点
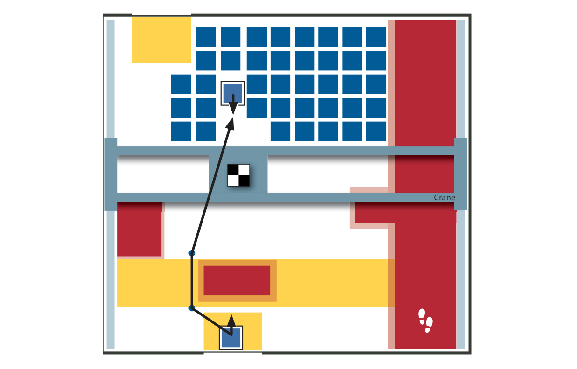
可支持行车大小车运行范围的路径避障功能,实现无静止点通过
支持纵向避障功能,可在行车大小车运行过程中,匹配地形信息控制行车吊具的高度
既可支持行车自动运行模式的防摇功能,也支持手操行车模式下实现手动防摇功能
支持运行过程故障急停功能
支持运行过程二次修改目标位置功能
支持运行过程修改速度限制功能
支持WEB修改调试防摇参数功能
支持曲线监视、调试分析功能
技术参数

控制周期:50ms
控制定位精度25mm
摇摆角度<±0.4度
测量速度:15米/秒
绳长范围:2.5~50m
角度分辨率:0.04度
角度范围:-8.5~8.5度
主要功能
绳长范围:2.5~50m
控制定位精度25mm
摇摆角度<±0.4度
角度范围:-8.5~8.5度
测量速度:15米/秒
角度分辨率:0.04度
控制周期:50ms
适用场景